

{kind=link}
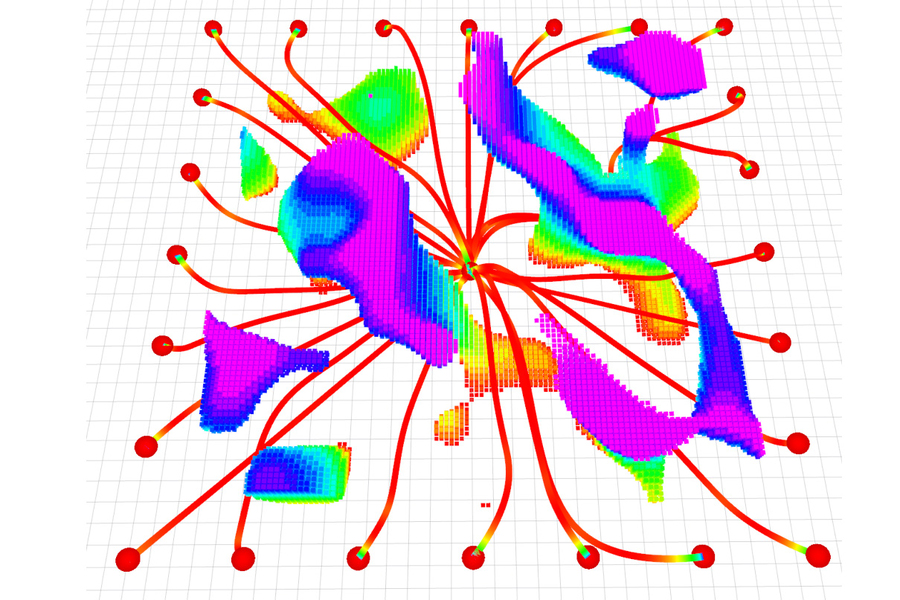 A determine reveals a number of flight pathways as a UAV begins from the middle and flies towards 24 objectives (dots round perimeter). The flight pathways are primarily pink and finish in cool colours, exhibiting lowered pace. The rainbow clouds signify obstacles, with cooler colours representing taller obstacles. Credit score: Courtesy of the researchers.
A determine reveals a number of flight pathways as a UAV begins from the middle and flies towards 24 objectives (dots round perimeter). The flight pathways are primarily pink and finish in cool colours, exhibiting lowered pace. The rainbow clouds signify obstacles, with cooler colours representing taller obstacles. Credit score: Courtesy of the researchers.
By Adam Zewe
Within the aftermath of a devastating earthquake, unpiloted aerial autos (UAVs) may fly by a collapsed constructing to map the scene, giving rescuers data they should shortly attain survivors.
However this stays an especially difficult drawback for an autonomous robotic, which would wish to swiftly modify its trajectory to keep away from sudden obstacles whereas staying on the right track.
Researchers from MIT and the College of Pennsylvania developed a brand new trajectory-planning system that tackles each challenges directly. Their approach allows a UAV to react to obstacles in milliseconds whereas staying on a easy flight path that minimizes journey time.
Their system makes use of a brand new mathematical formulation that ensures the robotic travels safely to its vacation spot alongside a possible path, and that’s much less computationally intensive than different methods. On this means, it generates smoother trajectories sooner than state-of-the-art strategies.
The trajectory planner can be environment friendly sufficient for real-time flight utilizing solely the robotic’s onboard laptop and sensors.
Named MIGHTY, the open-source system doesn’t require proprietary software program packages that may price lots of of hundreds of {dollars}. It may very well be extra readily deployed in a greater diversity of real-world settings.
Along with search-and-rescue, MIGHTY may very well be utilized in functions like last-mile supply in city areas, the place UAVs have to keep away from buildings, wires, and other people, or in industrial inspection of complicated constructions, reminiscent of wind generators.
“MIGHTY achieves comparable or higher efficiency utilizing solely open-source instruments, which suggests any researcher, scholar, or firm — anyplace on the earth — can use it freely. By eradicating this price barrier, MIGHTY helps democratize high-performance trajectory planning and opens the door for a much wider group to construct on this work,” says Kota Kondo, an aeronautics and astronautics graduate scholar and lead creator of a paper on this trajectory planner.
Kondo is joined on the paper by Yuwei Wu, a graduate scholar on the College of Pennsylvania; Vijay Kumar, a professor at UPenn; and senior creator Jonathan P. How, a Ford professor of aeronautics and astronautics and a principal investigator within the Laboratory for Info and Choice Methods (LIDS) and the Aerospace Controls Laboratory (ACL) at MIT. The analysis seems in IEEE Robotics and Automation Letters.
Overcoming trade-offs
When Kondo was a toddler, the Fukushima Daiichi nuclear accident occurred following the Nice East Japan Earthquake. With faculty cancelled, Kondo was caught at residence and watched the information on daily basis as staff explored and secured the reactor web site. Some staff nonetheless needed to enter hazardous areas to comprise the injury and assess the state of affairs, exposing them to excessive doses of radioactive materials.
“I grew to become obsessed with creating autonomous robots that may go into these dynamic and harmful conditions, then come again and report back to people who keep out of hurt’s means,” Kondo says.
This job requires a powerful trajectory planner, which is software program that decides the trail a robotic ought to observe to securely get from level A to level B.
However many current methods pressure tradeoffs that restrict efficiency.
Whereas some business methods can quickly generate easy trajectories, they will price lots of of hundreds of {dollars}. Open-source options usually underperform in comparison with business solvers or are tough to make use of.
With MIGHTY, Kondo and his colleagues developed an open-source system that produces high-quality, easy trajectories whereas reacting to obstacles in real-time, and which runs quick sufficient for flight utilizing solely onboard parts.
To do that, they overcame a key problem that limits many open-source methods.
These strategies often estimate how lengthy it should take the robotic to get from level A to level B as a primary step. From that fastened estimation of journey time, the planner finds the very best path to succeed in the vacation spot.
Whereas utilizing a hard and fast journey time permits the planner to quickly generate a trajectory, it has drawbacks. For one, if the UAV should go far out of its approach to keep away from obstacles, it may very well be pressured to crank up the pace to fulfill the fastened travel-time finances. This makes it tougher to keep away from sudden hazards.
A MIGHTY technique
As a substitute, MIGHTY makes use of a mathematical approach, known as a Hermite spline, that optimizes the journey time and flight path collectively, in a single step, to kind a easy trajectory that may be exactly managed.
“Optimizing the spatial and temporal parts collectively will get us higher outcomes, however now the optimization turns into a lot larger that it’s tougher to resolve in a possible period of time,” Kondo says.
The researchers used a intelligent approach to scale back this computational overhead.
As a substitute of producing a trajectory from scratch every time, MIGHTY makes an preliminary guess of a trajectory. Then it refines the trajectory by an iterative optimization, utilizing a map of the scene generated by the UAV’s lidar sensors.
“We will make a good guess of what the trajectory ought to be, which is so much sooner than producing all the factor from nothing,” Kondo says.
This permits MIGHTY to react in real-time to unknown obstacles whereas protecting the trajectory easy and minimizing journey time. The system makes use of the UAV’s onboard parts, which is necessary for functions the place a robotic may journey removed from a base station.
In simulated experiments, MIGHTY wanted solely about 90 p.c of the computation time required by state-of-the-art strategies, whereas safely reaching its vacation spot about 15 p.c sooner than these approaches.
Once they examined the system on actual robots, it reached a pace of 6.7 meters per second whereas avoiding each impediment that appeared in its path.
“With MIGHTY, every thing is built-in in a single piece. It doesn’t want to speak to some other piece of software program to get an answer. This helps us be even sooner than a number of the business solvers,” Kondo says.
Sooner or later, the researchers need to improve MIGHTY so it may be used to manage a number of robots directly and conduct extra flight experiments in difficult environments. They hope to proceed bettering the open-source system based mostly on consumer suggestions.
“MIGHTY makes an necessary contribution to agile robotic navigation by revisiting the trajectory illustration itself. Hermite splines have already been efficiently utilized in visible simultaneous localization and mapping, and it’s good to see their benefits now being exploited for trajectory planning in cellular robots. By enabling joint optimization of path geometry, timing, velocity, and acceleration whereas retaining native management of the trajectory, MIGHTY offers robots extra freedom to compute quick, dynamically possible motions in cluttered environments,” says Davide Scaramuzza, professor and director of the Robotics and Notion Group on the College of Zurich, who was not concerned with this analysis.
This analysis was funded, partly, by the USA Military Analysis Laboratory and the Protection Science and Expertise Company in Singapore.

MIT Information