

It’s pretty simple for individuals to be taught from different individuals – we’ve been doing it for round 300,000 years – as a result of we will observe, copy, and modify what they’re doing. It’s much less simple for us to be taught from different animals that means, as a result of the much less our cognition and our bodies are alike, the more durable it’s to repeat and modify what they do. Studying about vegetation, fungi, protozoa, and micro organism is straightforward sufficient, however studying from them? Neglect it.
So, what about robots? Certain, we will program them to do what people do (and at a lot sooner speeds), they usually can be taught from observing people at work, however can we “train” the identical bodily abilities to robots with completely different buildings, working methods, and code?
Researchers within the Studying Algorithms and Methods Laboratory (LASA) within the College of Engineering at Switzerland’s Federal Expertise Institute of Lausanne (EPFL) have created a brand new means to assist robots emulate human exercise, in order that extremely varied robots gained’t want people to customise code to swimsuit every robotic kind. For researchers and trade, such a system provides huge cost- and time-savings.
Of their Science Robotics paper, Sthithpragya Gupta and Aude Billard focus on how kinematic intelligence – a brand new strategy to learning-from-demonstration (LfD) – permits robots that could be formed as in a different way from one another as R2D2 and a dishwasher to realize new abilities from observing the identical demonstration by a human trainer.
2026 LASA EPFL CC BY SA
Whereas roboticists have already been utilizing LfD for robots of the identical mannequin, kinematic intelligence “scans” exercise – mathematically changing noticed motion into a method adaptable for every robotic’s particular person joint and motion limits and different bodily constraints and benefits. After studying from just a few and even only one demonstration, the “scholar” robots – no matter their physique sorts – use the “globally secure dynamical system” to succeed at their new duties.
“Every robotic dealt with completely different steps of the duty,” says co-first writer Sthithpragya Gupta, “and the system carried out efficiently even when the step allocation was modified. Every robotic interprets the identical ability in its personal means, however all the time inside secure and possible limits.”
As LASA head Aude Billard notes, “This work addresses a long-standing problem in robotics: methods to switch a realized ability throughout robots with completely different mechanical buildings, whereas guaranteeing secure and predictable conduct.” Kinematic intelligence may “considerably scale back the time and experience wanted to deploy robots in real-world settings.”
Kinematic intelligence started with EPFL researchers motion-capturing people setting, shoving, tossing, and in any other case manipulating objects.
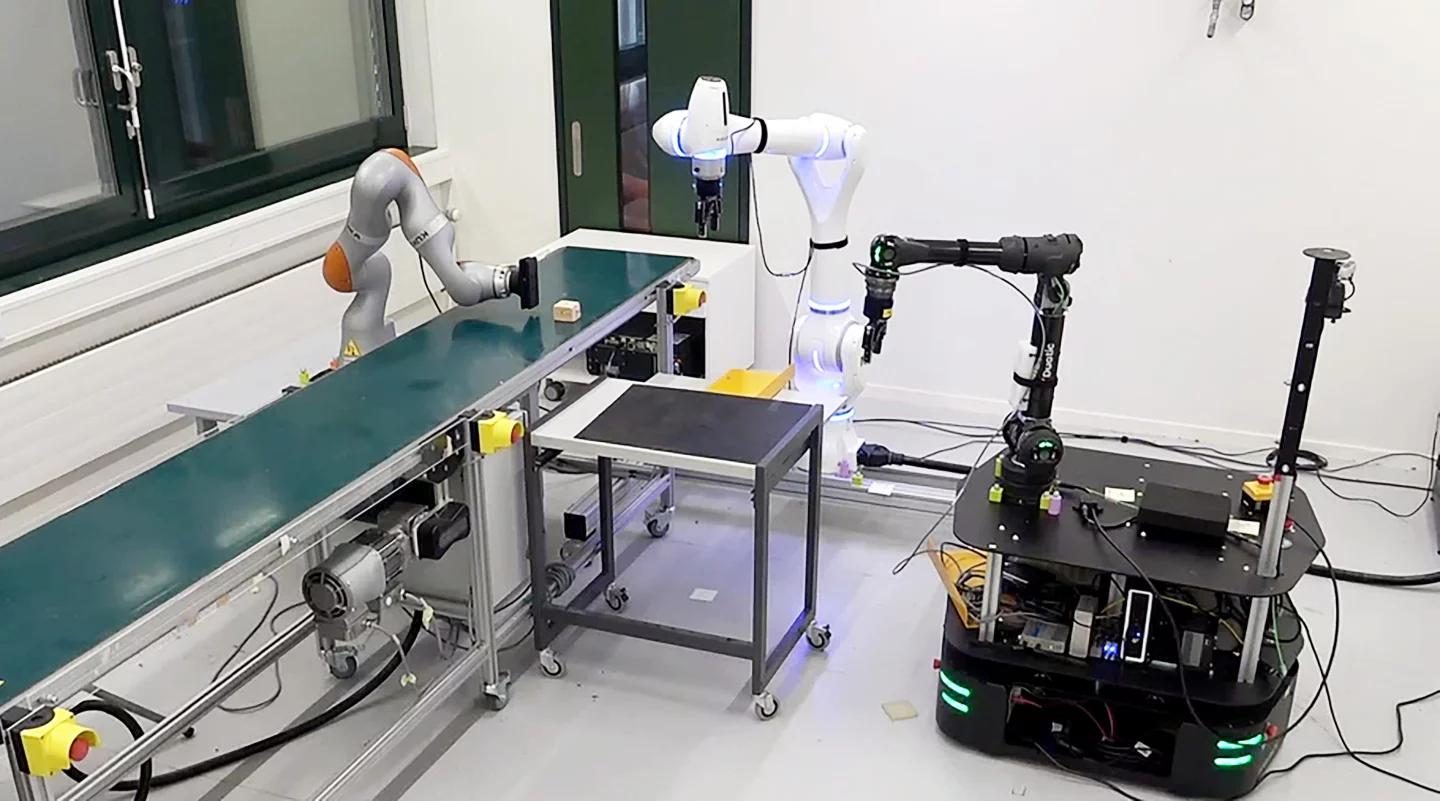
Then they created a system for classifying various robotic bodily constraints reminiscent of balance-limits and joint range-of-motion, and blended that info with the motion-capture knowledge to develop their robotic observational and adaptational studying. Throughout experiments, after observing people, three utterly dissimilar industrial robots may push picket blocks from a conveyor belt onto a piece station, transfer them onto tables, and toss them into receptacles safely and reliably.
If the work proceeds because the researchers hope it is going to, the outcomes will embody permit people to easily describe novel actions for robots to carry out – with out robotic statement, and positively with out new coding. “Our objective,” says co-first writer Durgesh Haribhau Salunkhe, “is to take away the necessity for technical experience whereas nonetheless guaranteeing secure and dependable operation. The person brings the concept and the specified conduct, and the robotic ought to deal with the remainder.”
Supply: EPFL