

{kind=link}
The phrase “observe makes good” is normally reserved for people, but it surely’s additionally an amazing maxim for robots newly deployed in unfamiliar environments.
Image a robotic arriving in a warehouse. It comes packaged with the talents it was skilled on, like inserting an object, and now it wants to choose gadgets from a shelf it’s not aware of. At first, the machine struggles with this, because it must get acquainted with its new environment. To enhance, the robotic might want to perceive which expertise inside an general process it wants enchancment on, then specialize (or parameterize) that motion.
A human onsite might program the robotic to optimize its efficiency, however researchers from MIT’s Laptop Science and Synthetic Intelligence Laboratory (CSAIL) and The AI Institute have developed a simpler various. Introduced on the Robotics: Science and Programs Convention final month, their “Estimate, Extrapolate, and Situate” (EES) algorithm permits these machines to observe on their very own, probably serving to them enhance at helpful duties in factories, households, and hospitals.
Sizing up the state of affairs
To assist robots get higher at actions like sweeping flooring, EES works with a imaginative and prescient system that locates and tracks the machine’s environment. Then, the algorithm estimates how reliably the robotic executes an motion (like sweeping) and whether or not it might be worthwhile to observe extra. EES forecasts how effectively the robotic might carry out the general process if it refines that specific talent, and eventually, it practices. The imaginative and prescient system subsequently checks whether or not that talent was performed accurately after every try.
EES might turn out to be useful in locations like a hospital, manufacturing facility, home, or espresso store. For instance, in the event you wished a robotic to scrub up your front room, it might need assistance working towards expertise like sweeping. In accordance with Nishanth Kumar SM ’24 and his colleagues, although, EES might assist that robotic enhance with out human intervention, utilizing only some observe trials.
“Going into this challenge, we puzzled if this specialization could be attainable in an affordable quantity of samples on an actual robotic,” says Kumar, co-lead creator of a paper describing the work, PhD scholar in electrical engineering and pc science, and a CSAIL affiliate. “Now, we now have an algorithm that allows robots to get meaningfully higher at particular expertise in an affordable period of time with tens or a whole bunch of information factors, an improve from the hundreds or tens of millions of samples that a regular reinforcement studying algorithm requires.”
See Spot sweep
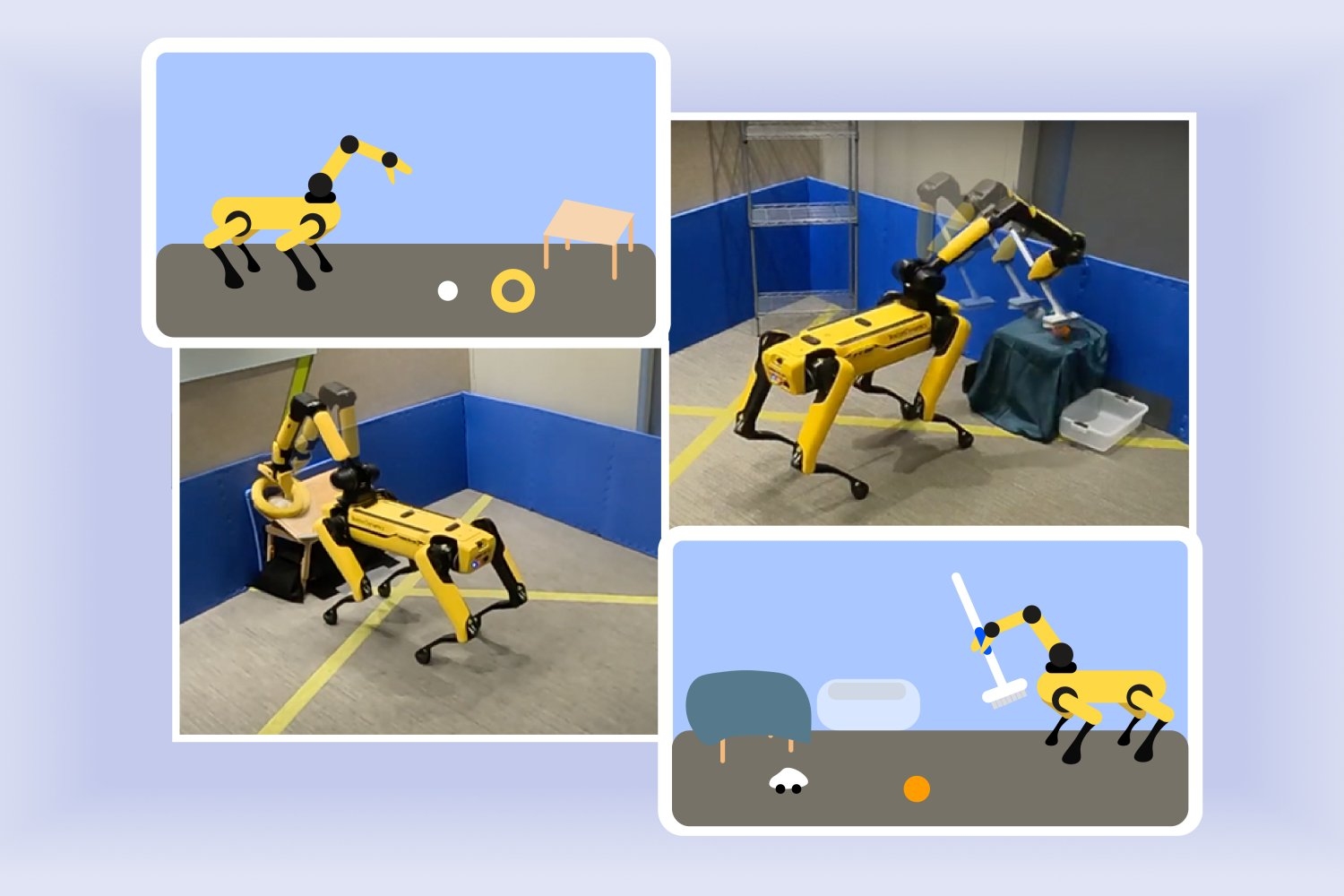
EES’s knack for environment friendly studying was evident when applied on Boston Dynamics’ Spot quadruped throughout analysis trials at The AI Institute. The robotic, which has an arm connected to its again, accomplished manipulation duties after working towards for just a few hours. In a single demonstration, the robotic discovered how one can securely place a ball and ring on a slanted desk in roughly three hours. In one other, the algorithm guided the machine to enhance at sweeping toys right into a bin inside about two hours. Each outcomes look like an improve from earlier frameworks, which might have doubtless taken greater than 10 hours per process.
“We aimed to have the robotic gather its personal expertise so it could actually higher select which methods will work effectively in its deployment,” says co-lead creator Tom Silver SM ’20, PhD ’24, {an electrical} engineering and pc science (EECS) alumnus and CSAIL affiliate who’s now an assistant professor at Princeton College. “By specializing in what the robotic is aware of, we sought to reply a key query: Within the library of expertise that the robotic has, which is the one that might be most helpful to observe proper now?”
EES might ultimately assist streamline autonomous observe for robots in new deployment environments, however for now, it comes with just a few limitations. For starters, they used tables that have been low to the bottom, which made it simpler for the robotic to see its objects. Kumar and Silver additionally 3D printed an attachable deal with that made the comb simpler for Spot to seize. The robotic didn’t detect some gadgets and recognized objects within the incorrect locations, so the researchers counted these errors as failures.
Giving robots homework
The researchers notice that the observe speeds from the bodily experiments may very well be accelerated additional with the assistance of a simulator. As an alternative of bodily working at every talent autonomously, the robotic might ultimately mix actual and digital observe. They hope to make their system quicker with much less latency, engineering EES to beat the imaging delays the researchers skilled. Sooner or later, they might examine an algorithm that causes over sequences of observe makes an attempt as an alternative of planning which expertise to refine.
“Enabling robots to be taught on their very own is each extremely helpful and very difficult,” says Danfei Xu, an assistant professor within the Faculty of Interactive Computing at Georgia Tech and a analysis scientist at NVIDIA AI, who was not concerned with this work. “Sooner or later, residence robots can be bought to all types of households and anticipated to carry out a variety of duties. We won’t probably program all the things they should know beforehand, so it’s important that they’ll be taught on the job. Nevertheless, letting robots free to discover and be taught with out steering may be very gradual and would possibly result in unintended penalties. The analysis by Silver and his colleagues introduces an algorithm that permits robots to observe their expertise autonomously in a structured manner. This can be a massive step in the direction of creating residence robots that may constantly evolve and enhance on their very own.”
Silver and Kumar’s co-authors are The AI Institute researchers Stephen Proulx and Jennifer Barry, plus 4 CSAIL members: Northeastern College PhD scholar and visiting researcher Linfeng Zhao, MIT EECS PhD scholar Willie McClinton, and MIT EECS professors Leslie Pack Kaelbling and Tomás Lozano-Pérez. Their work was supported, partly, by The AI Institute, the U.S. Nationwide Science Basis, the U.S. Air Drive Workplace of Scientific Analysis, the U.S. Workplace of Naval Analysis, the U.S. Military Analysis Workplace, and MIT Quest for Intelligence, with high-performance computing sources from the MIT SuperCloud and Lincoln Laboratory Supercomputing Heart.