

{kind=link}
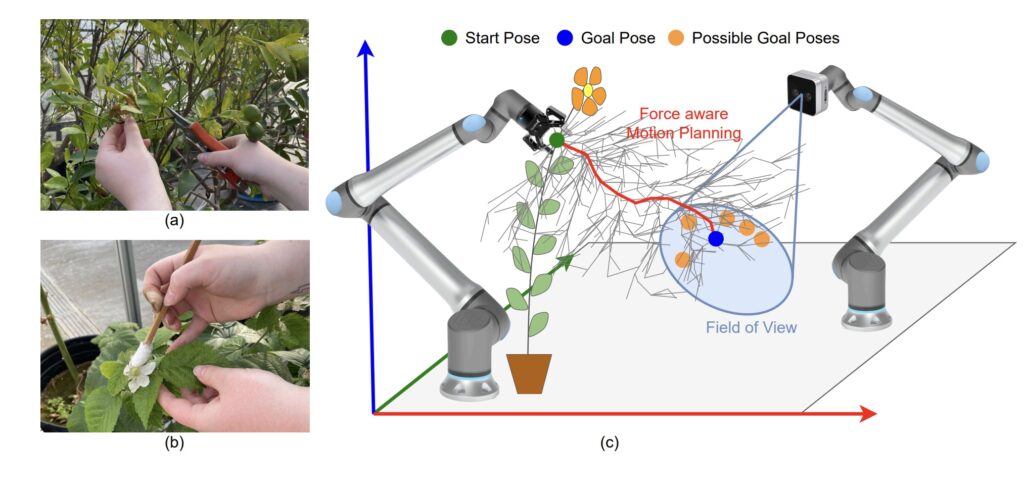 People usually use one hand to know the department for higher accessibility, whereas the opposite hand is used to carry out main duties like (a) department pruning and (b) hand pollination of the flower. (c) An summary of the strategy utilized by Madhav and colleagues, the place one robotic manipulates the department to maneuver the flower to the sphere of view of one other robotic by planning a force-aware path. Determine from Power Conscious Department Manipulation To Help Agricultural Duties.
People usually use one hand to know the department for higher accessibility, whereas the opposite hand is used to carry out main duties like (a) department pruning and (b) hand pollination of the flower. (c) An summary of the strategy utilized by Madhav and colleagues, the place one robotic manipulates the department to maneuver the flower to the sphere of view of one other robotic by planning a force-aware path. Determine from Power Conscious Department Manipulation To Help Agricultural Duties.
Of their paper Power Conscious Department Manipulation To Help Agricultural Duties, which was offered at IROS 2025, Madhav Rijal, Rashik Shrestha, Trevor Smith, and Yu Gu proposed a technique to securely manipulate branches to help numerous agricultural duties. We interviewed Madhav to search out out extra.
Might you give us an summary of the issue you had been addressing within the paper?
Madhav Rijal (MR): Our work is motivated by StickBug [1], a multi-armed robotic system for precision pollination in greenhouse environments. One of many most important challenges StickBug faces is that many flowers are partially or totally hidden inside the plant cover, making them tough to detect and attain immediately for pollination. This problem additionally arises in different agricultural duties, akin to fruit harvesting, the place goal fruits could also be occluded by surrounding branches and foliage.
To deal with this, we examine how one robotic arm can safely manipulate branches in order that these occluded flowers will be introduced into the sphere of view or reachable workspace of one other robotic arm. It is a difficult manipulation drawback as a result of plant branches are deformable, fragile, and range considerably from one department to a different. As well as, in contrast to pick-and-place duties, the place objects transfer freely in house, branches stay connected to the plant, which imposes further movement constraints throughout manipulation. If the robotic strikes a department with out accounting for these constraints and security limits, it could possibly apply extreme power and injury the department.
So, the core drawback we addressed on this paper is: how can a robotic safely manipulate branches to disclose hidden flowers whereas remaining conscious of interplay forces and minimizing injury?
How did your strategy go about tackling the issue?
MR: Our strategy [2] combines movement planning that accounts for department constraints with real-time power suggestions.
First, we generate a possible manipulation path utilizing an RRT* (quickly exploring random tree) algorithm-based planner within the workspace. The planner respects the geometric constraints of the department and the duty necessities. We mannequin branches as deformable linear objects and use a geometrical heuristic to establish configurations which can be safer to control.
Then, throughout execution, we monitor the interplay power utilizing a power sensor mounted on the manipulator. If the measured power exceeds a predefined protected threshold, the system doesn’t proceed alongside the identical path. As a substitute, it re-plans the movement on-line and searches for an alternate path or objective configuration that may scale back department stress whereas nonetheless attaining the duty.
So, the important thing concept is that the robotic doesn’t plan just for reachability. It additionally adapts its movement primarily based on the bodily response of the department throughout manipulation.
 Madhav with the multi-armed pollination robotic, StickBug.
Madhav with the multi-armed pollination robotic, StickBug.
What are the primary contributions of your work?
MR: The principle contributions of our work are:
- A geometrical heuristic mannequin for department manipulation that doesn’t require branch-specific parameter tuning or bodily probing.
- A movement planning technique for department manipulation that respects each workspace and department constraints, utilizing the geometric heuristic to information RRT* and incorporating on-line replanning primarily based on power suggestions.
- An experimental demonstration displaying that power feedback-based movement planning can shield branches from extreme power throughout manipulation.
- Generalization throughout totally different department sorts, for the reason that technique depends totally on department geometry and might adapt on-line to compensate for mannequin inaccuracies.
Might you discuss concerning the experiments that you simply carried out to check the strategy?
MR: We evaluated the proposed technique via a set of department manipulation experiments utilizing 5 totally different beginning poses, all focusing on a standard objective area. Every configuration was examined 10 instances, leading to a complete of fifty trials. A trial was thought of profitable if the robotic introduced the grasp level to inside 5 cm of the objective level. For all trials, the planning time restrict was set to 400 seconds, and the allowable interplay power vary was −40 N to 40 N. Throughout the 50 trials, 39 had been profitable and 11 failed, equivalent to successful charge of about 78%. The typical variety of replanning makes an attempt throughout all eventualities was 20.
By way of power discount, the outcomes present a transparent development in security. Constraint-aware planning lowered the manipulation power from above 100 N to beneath 60 N. Constructing on this, on-line force-aware replanning additional lowered the power from about 60 N to beneath the specified 40 N threshold. This means that security consciousness via geometric heuristics, which mannequin branches as deformable linear objects, along with force-aware on-line replanning, can successfully decrease interplay forces throughout manipulation.
Total, the experiments display that the proposed framework allows safer department manipulation whereas sustaining process feasibility. By combining branch-constraint-aware planning with real-time power suggestions, the robotic can adapt its movement to scale back extreme power and reduce the chance of department injury. These findings spotlight the worth of force-aware planning for sensible robotic manipulation in agricultural environments.
Do you might have plans to additional prolong this work?
MR: Sure, there are a number of instructions for extending this work.
One present limitation is the necessity to outline a protected power threshold prematurely. In follow, several types of branches require totally different power limits for protected manipulation. A key route for future work is to be taught or estimate protected power thresholds routinely from department geometry or visible cues.
One other extension is to enhance grasp-point choice. As a substitute of solely replanning after greedy, the system might additionally purpose about essentially the most appropriate grasp level beforehand in order that the required manipulation power is lowered from the beginning.
We’re additionally considering designing a compliant gripper with built-in power sensing that’s higher fitted to manipulating delicate branches. In the long term, we plan to combine this technique right into a multi-arm agricultural robotic, the place one arm manipulates the department and one other performs pollination, pruning, or harvesting.
Total, this work advances the event of agricultural robots that may actively manipulate branches to help duties akin to harvesting, pruning, and pollination. By exposing fruits, minimize factors, and hidden flowers inside the cover, this functionality may help overcome key limitations to the broader adoption of robot-assisted agricultural applied sciences.
References
[1] Smith, Trevor, Madhav Rijal, Christopher Tatsch, R. Michael Butts, Jared Beard, R. Tyler Cook dinner, Andy Chu, Jason Gross, and Yu Gu. Design of Stickbug: a six-armed precision pollination robotic. In 2024 IEEE/RSJ Worldwide Convention on Clever Robots and Programs (IROS), pp. 69-75. IEEE, 2024.
[2] Rijal, Madhav, Rashik Shrestha, Trevor Smith, and Yu Gu, Power Conscious Department Manipulation To Help Agricultural Duties. In 2025 IEEE/RSJ Worldwide Convention on Clever Robots and Programs (IROS), pp. 1217-1222. IEEE, 2025.
About Madhav
|
| Madhav Rijal is a Ph.D. candidate in Mechanical Engineering at West Virginia College working in agricultural robotics. His analysis combines movement planning, optimization, multi-agent collaboration and distributed resolution making to develop robotic programs for precision pollination and different plant-interaction duties. His present work focuses on department manipulation and protected robotic operation in agricultural environments. |
tags: IROS

Lucy Smith
is Senior Managing Editor for Robohub and AIhub.
Lucy Smith
is Senior Managing Editor for Robohub and AIhub.